さて,16回目を迎えました踏切シリーズ,今回のテーマは
ページコンテンツ
モーター制御基板のユニット化
です.
はぁ?なに言ってるの?って感じですよね.これから詳しく見ていきましょう.
おおざっぱに言えばステッピングモーターを動かすための回路を独立させてコネクタなどで簡単に接続できるようにしよう,というのが今回の試みです.
回路構成
ステッピングモータードライバには,予定通り既製ICのTB6608FNGを使用することにしました.
ICのデータシートから
- 端子説明
- 端子配置
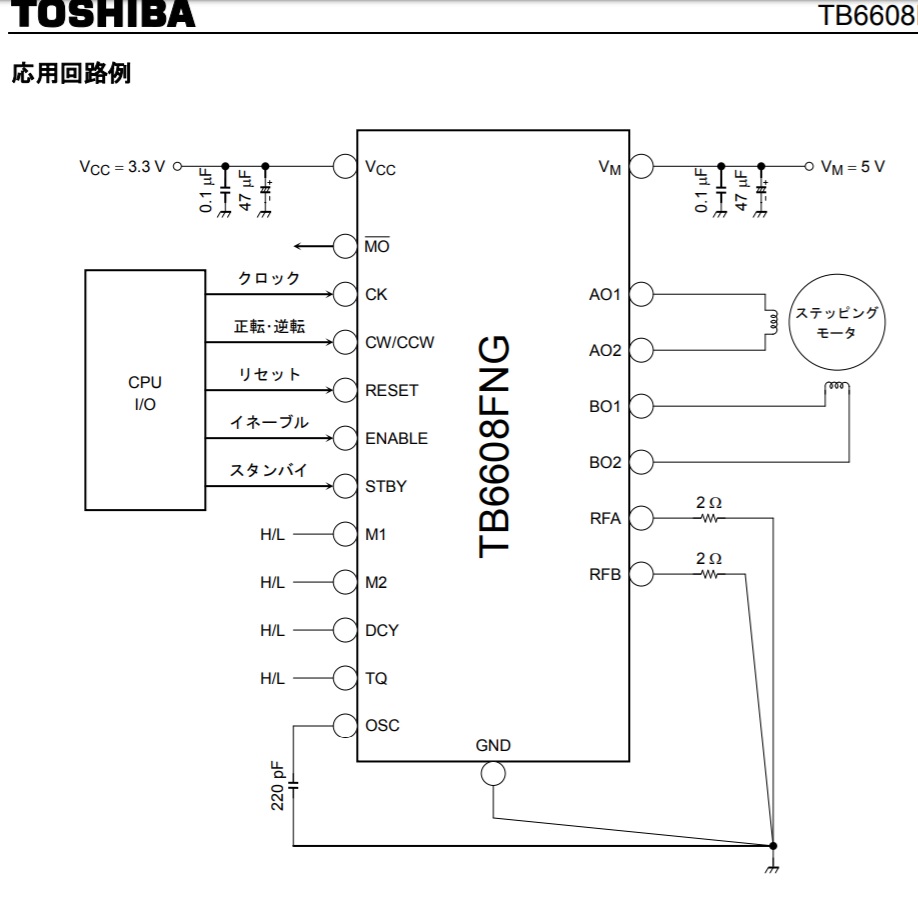
- 応用回路例
の3つをここに貼っておきます.



今回製作するユニット回路はこの応用回路例をまるまるそのまま使って作りました.
なるべく省スペースに収めたかったのでSMD(チップ)部品の使用を検討しましたが,チップ部品の手持ちがなかったので一旦諦めます.
使用したパーツ
- 東芝 TB6608FNG
- SSOP20ピン用DIP変換基板
- セラミックコンデンサ 220pF
- 抵抗器 2Ω(1Ω×2で代用)
- 抵抗器 2.2KΩ(入力端子の電流制限用)
- ポリウレタン線とはんだ
すべて秋月電子で揃います.
実体配線図
汚くてすいません..

これが原案でした.
2,4,5ピンにつながっている抵抗器はすべて2.2KΩです.
これをきれいに書き直して修正,改良した結果

このような配線にすることが決定しました.
他ユニットとの接続(特にarduinoとの接続)
持ち運びができるNゲージ向けの自動踏切を作るにあたって,katoやtomixのように踏切を片方ずつ分けて持ち運べるようにしなければなりません.
左右で分割できなくても最悪いいのですが(初号機ですし),左右の接続ケーブルに物理的負荷がかかりやすく移動も不便になるので,なるたけ左右をそれぞれユニット化してコネクタなどで接続できたほうがいいですよね.
ということで,専用のコネクタもないのでICソケットを使ってコネクタ代わりにしてみましょう!
こんな感じでICソケットをコネクタ替わりにしてみました.
では実験してみます.
コネクタを接続して
arduinoを動かします.すると…?
見事動きましたあ!
今回の実験が成功したので,左右の踏切同士の接続にはこの方法を用いたいと思います.
では,今回はこの辺で~👋
踏切自作シリーズはコチラ
→踏切
メッセージが送信されました







コメントを残す